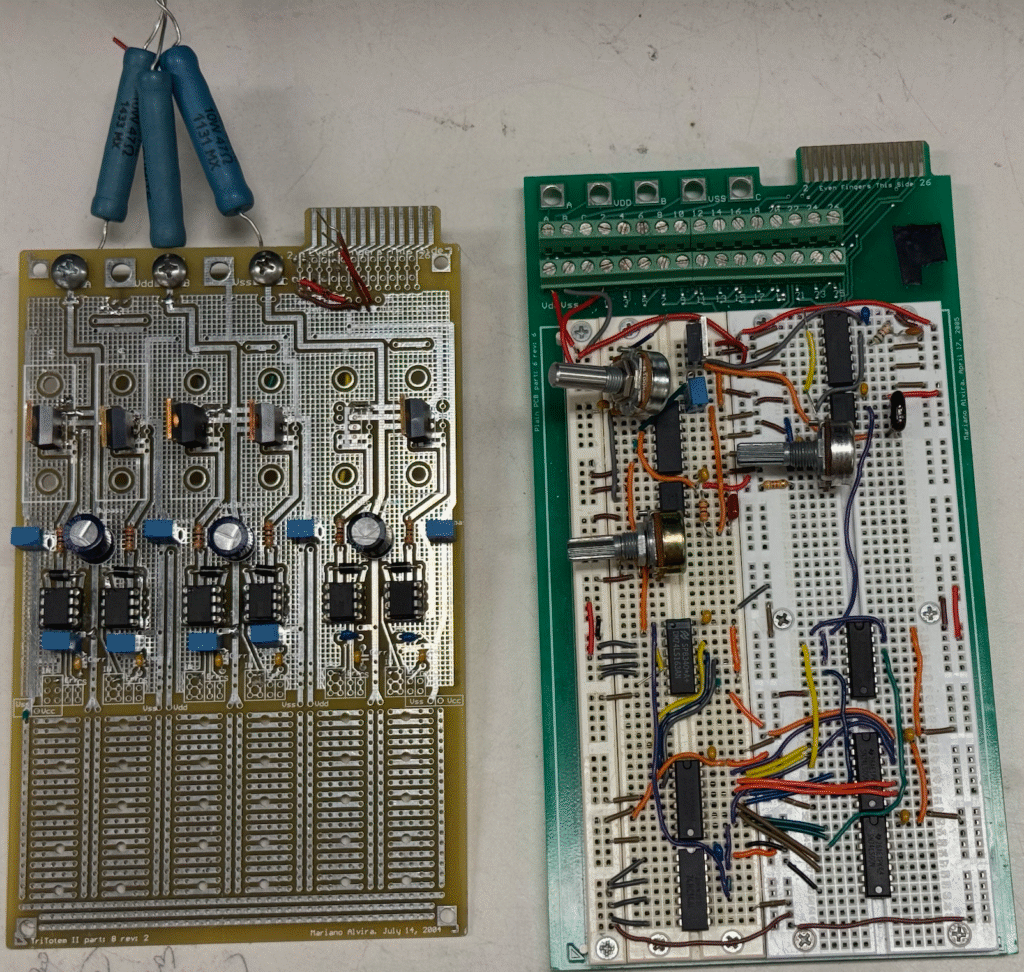
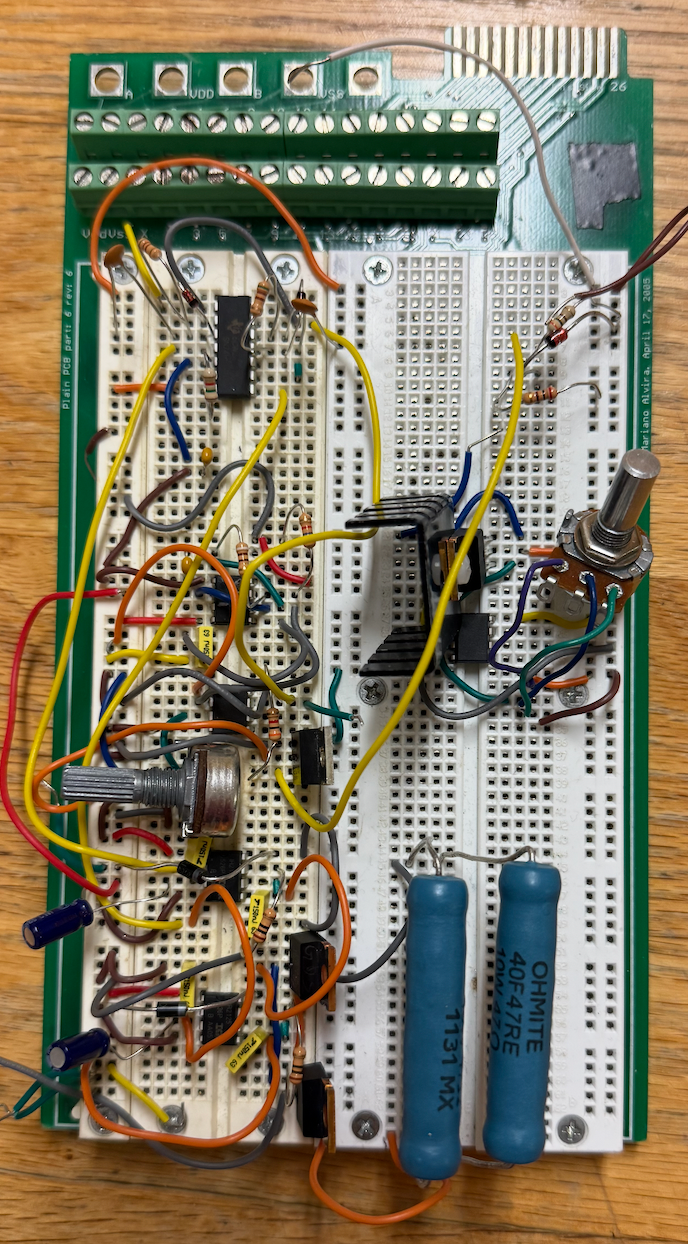
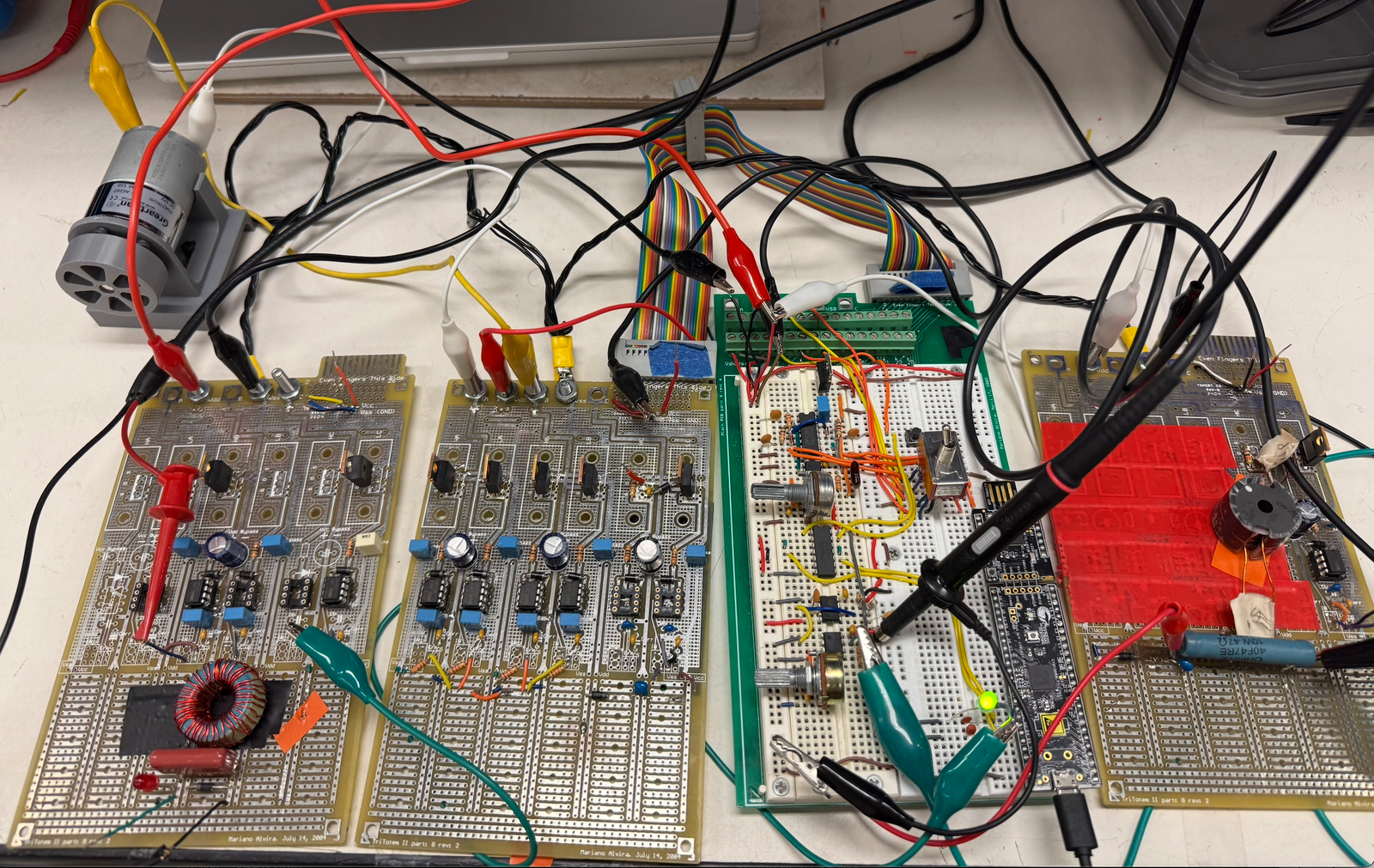
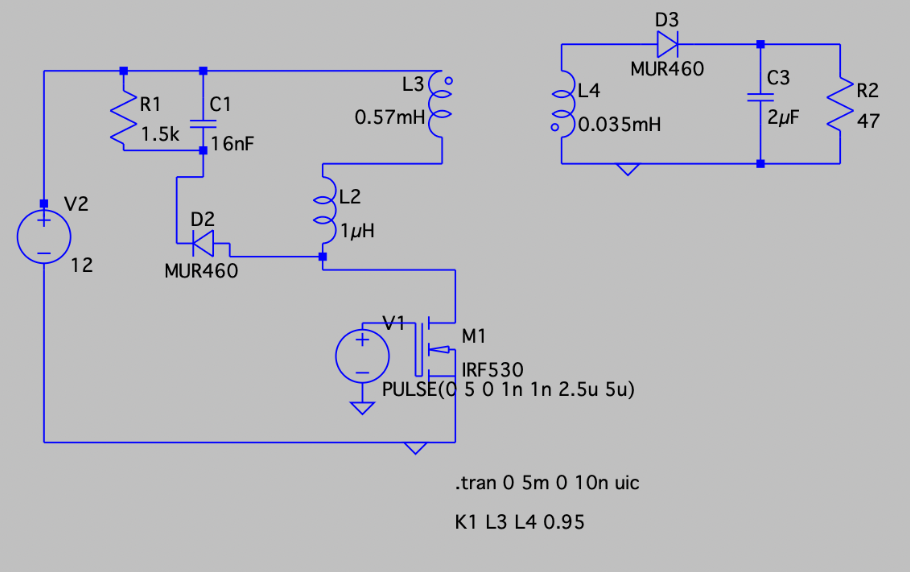
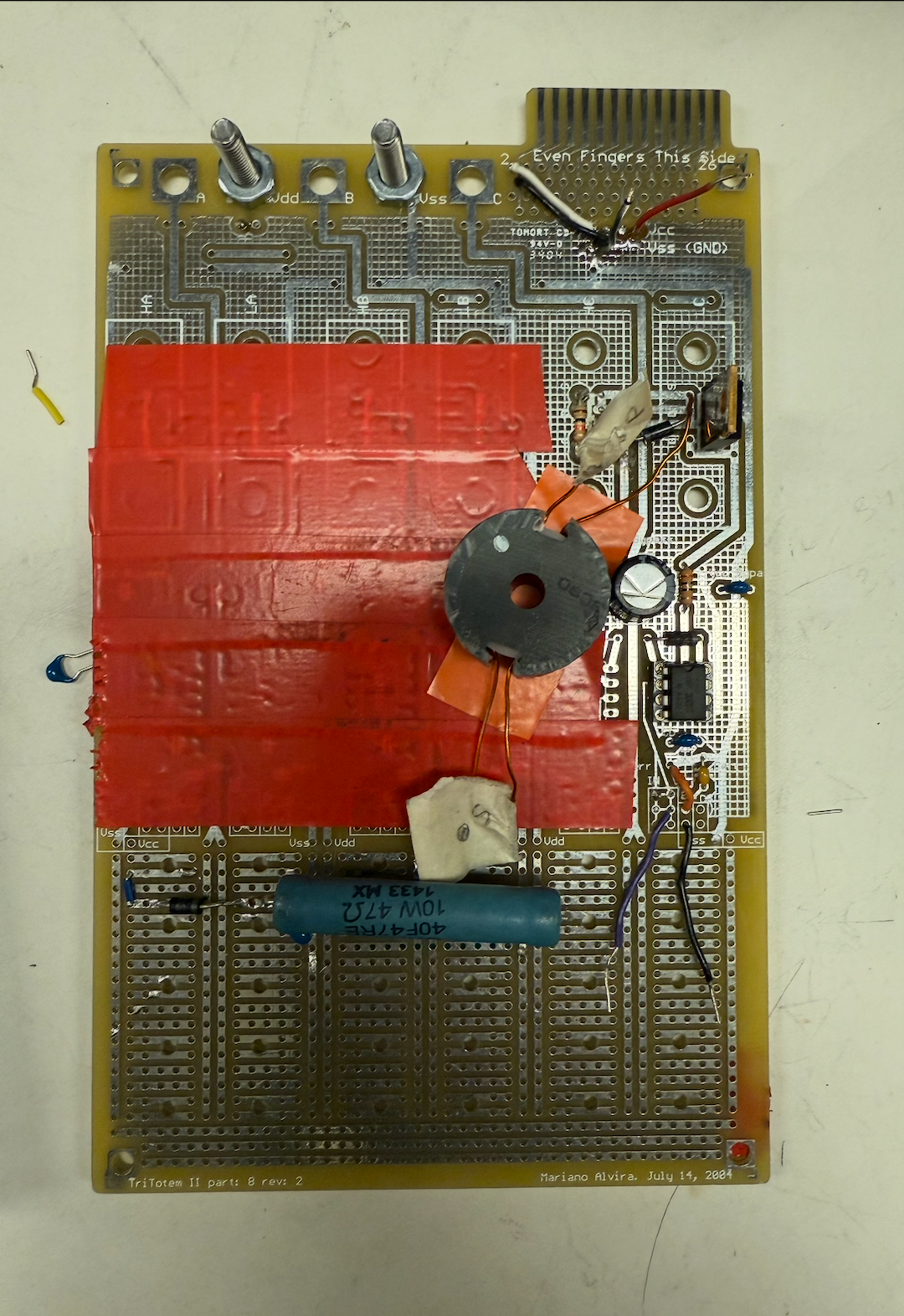
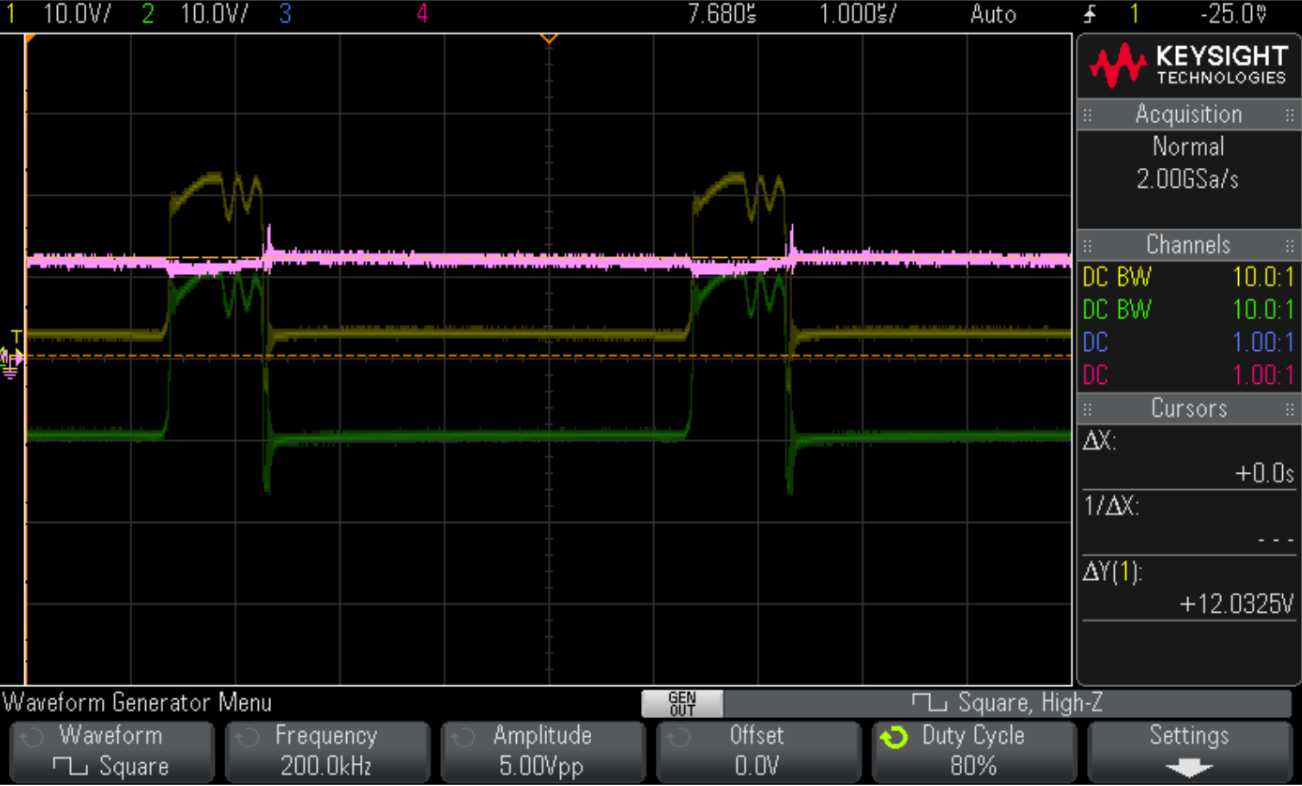
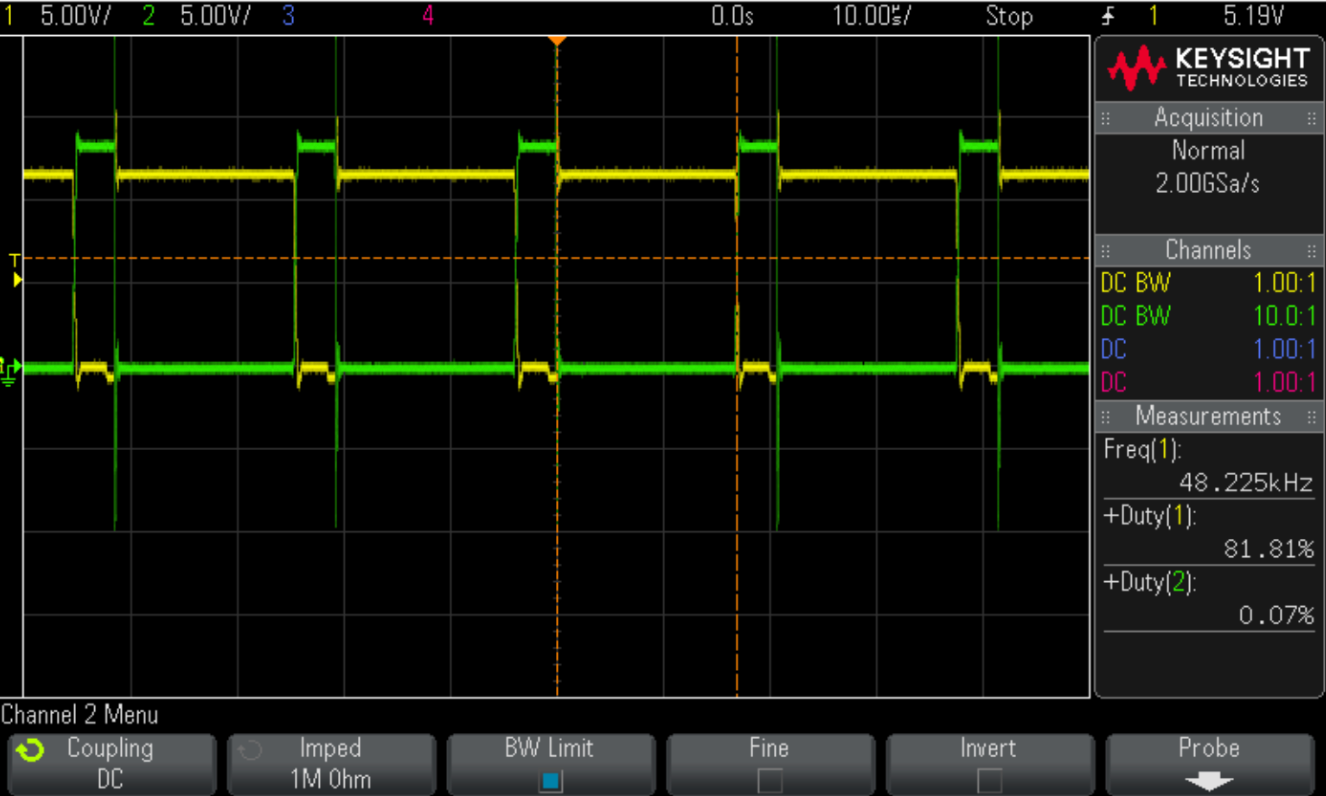
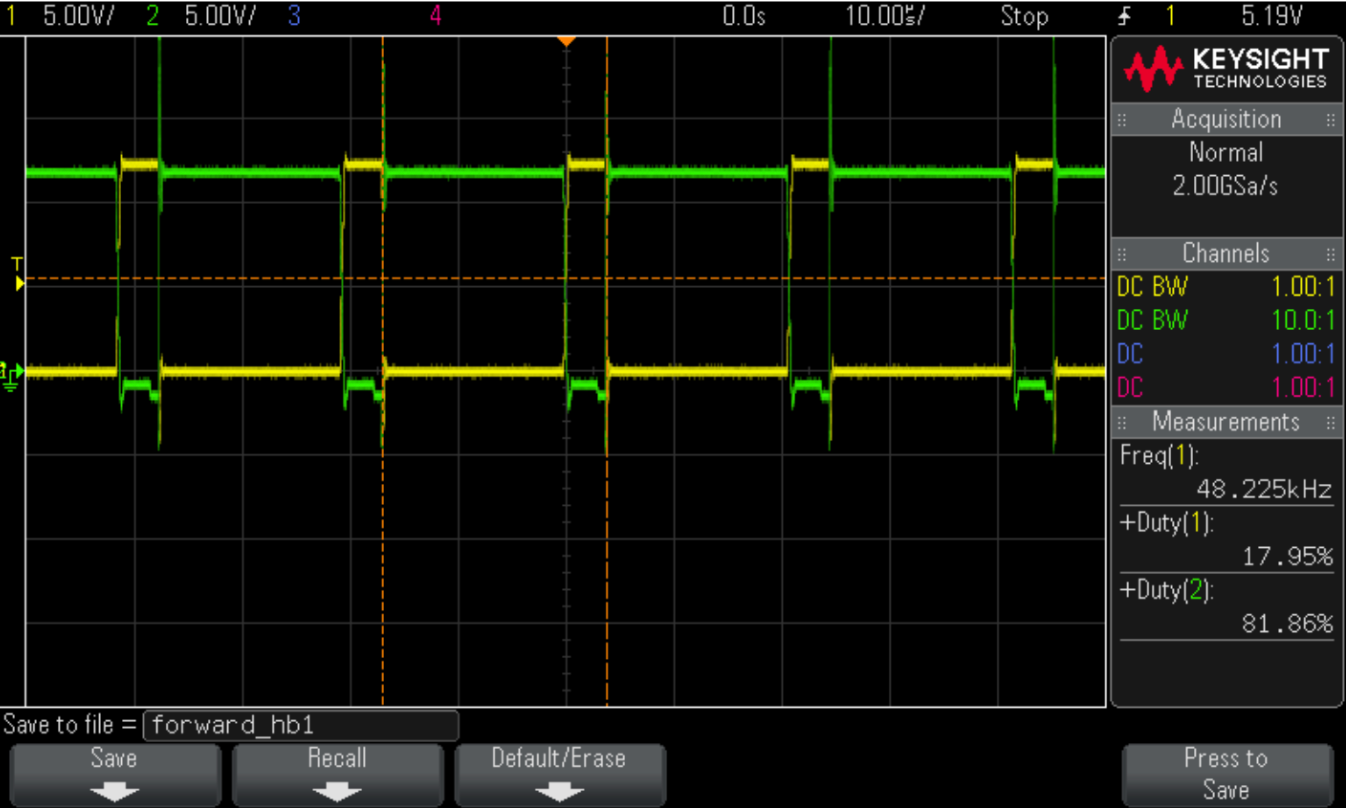
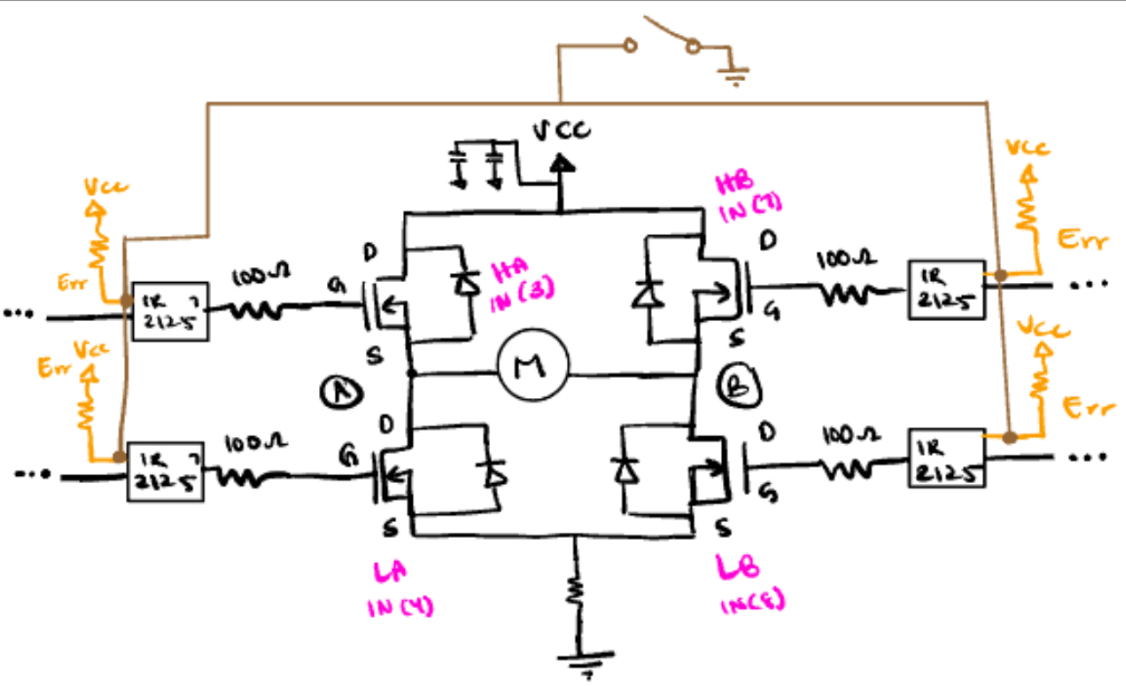
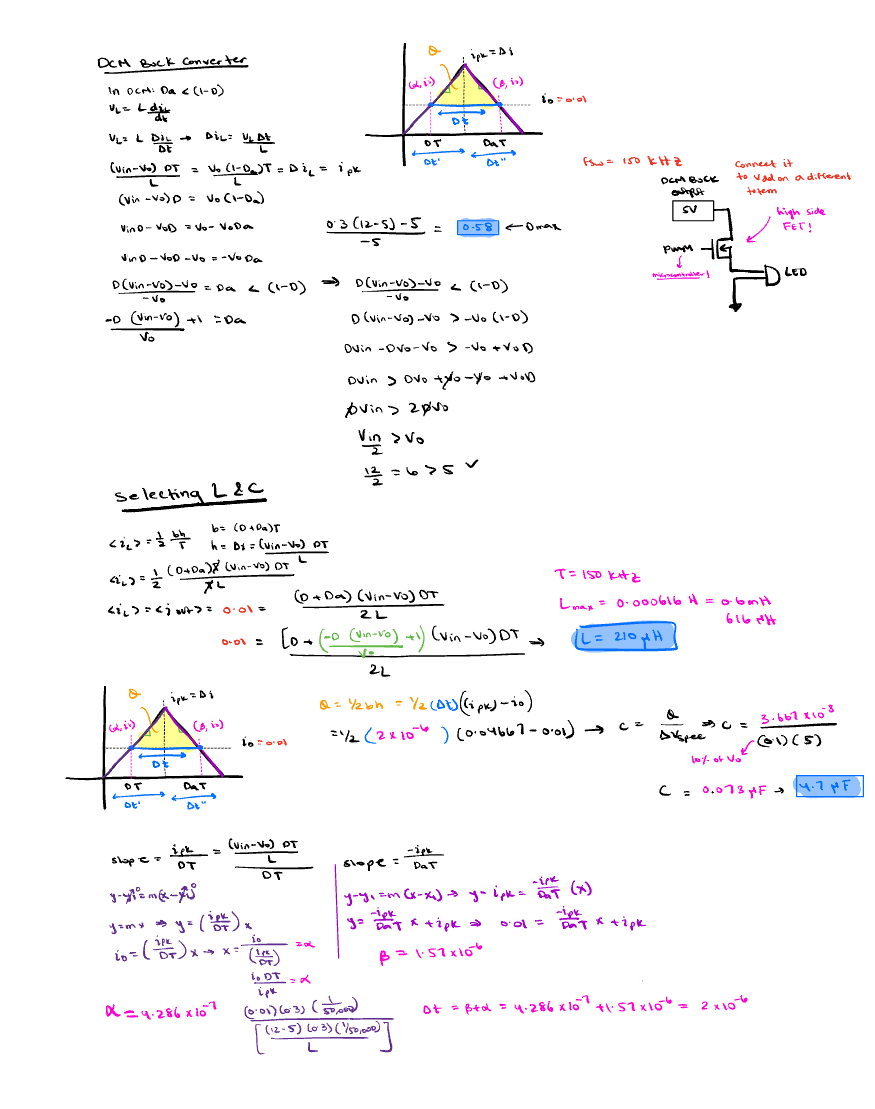
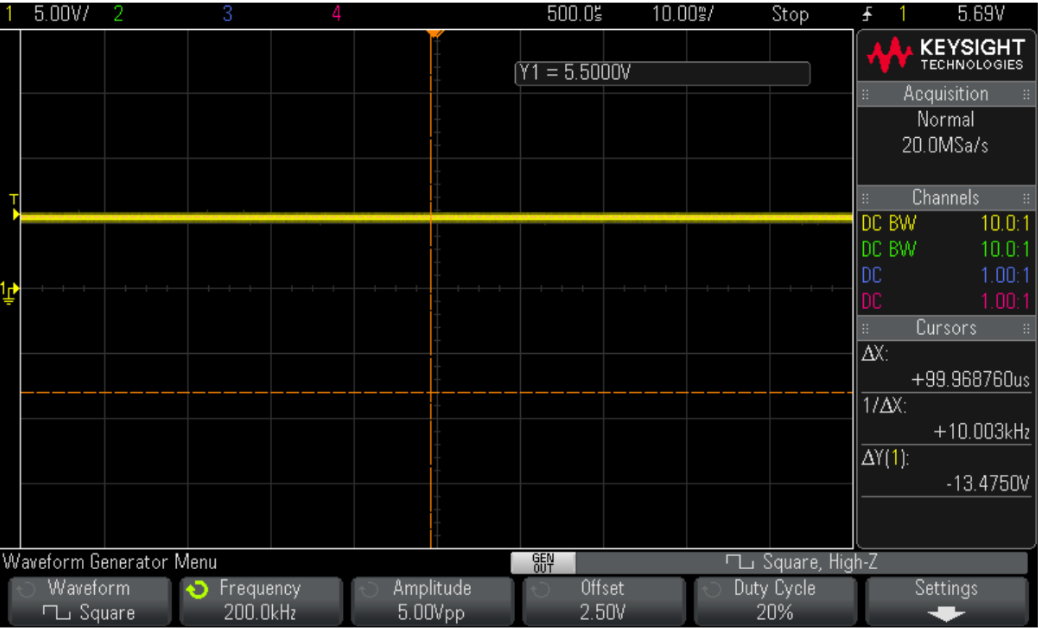
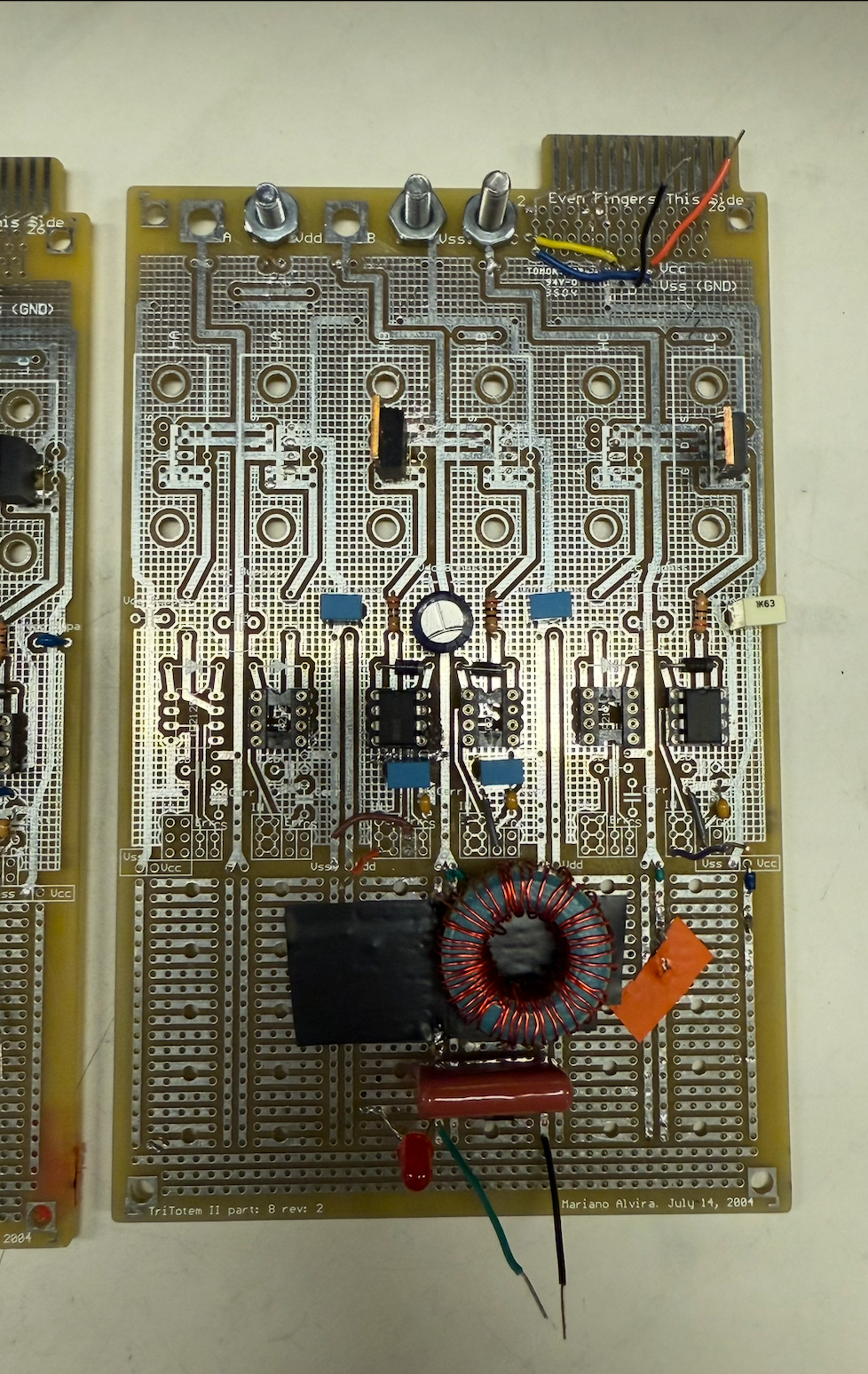
We designed the power electronic drive for an electric go-kart, consisting of a clock ramp, PWM generator, delay circuitry, and a totem-pole driver with a “turn-on” switch. In addition, L–C network acted as a low-pass filter to remove AC components and smooth the output voltage for stable motor operation.